
The selection of bearings is a crucial aspect of designing and optimizing robotic arms, which are essential components in a wide range of industries such as manufacturing, automotive, healthcare, and automation. The performance, reliability, and efficiency of a robotic arm largely depend on the bearings that support its moving parts. With robotic arms expected to perform precise movements under varying loads, speeds, and environmental conditions, choosing the right robot arm bearing becomes not just a technical requirement but a decisive factor in ensuring the robot’s operational success and longevity.
This article aims to guide engineers, designers, and procurement professionals through the essential considerations when selecting bearings for robotic arms. Whether you’re building a small, high-precision robotic arm or a large, heavy-duty industrial manipulator, understanding how to select the right bearing can have a profound impact on the robot’s efficiency and overall success in its designated tasks.

1. Load Capacity
Radial Load: Determines the bearing’s ability to support forces acting perpendicular to the shaft (e.g., weight of the arm).
Axial Load: Deals with forces along the shaft (e.g., forces when the arm moves or holds objects).
Moment Load: If the robotic arm involves rotation or tilting, the bearing should also support moment (torque) loads.
2. Precision and Tolerance
Robots, especially those used in industrial or precision applications, require bearings with high accuracy to maintain smooth movement and precise control.
Choose bearings with tight tolerances, such as angular contact bearings or high-precision ball bearings.
3. Durability and Lifetime
Bearings should be able to withstand continuous or heavy use, often in harsh environments. Consider bearings made from high-quality stainless steel or ceramic materials for better wear resistance.
If the robot operates in a dusty or dirty environment, sealed bearings or shielded bearings are ideal to prevent contaminants from entering.
4. Speed and Efficiency
The bearing must be able to handle the rotational speed required for the robot’s tasks without overheating or excessive wear.
High-speed bearings (e.g., ceramic ball bearings) can offer reduced friction and heat generation, ideal for applications where the robotic arm needs to operate quickly.
5. Lubrication
Consider whether the bearing needs lubrication and how easily it can be maintained.
Self-lubricating bearings can reduce maintenance requirements and are often used in robots that have limited accessibility for manual lubrication.
6. Size and Weight
A bearing that is too large or too small may not perform as expected or may add unnecessary weight to the robot.
Miniature bearings are suitable for smaller robots, while heavy-duty bearings are ideal for larger, industrial robotic arms.
7. Environment
Consider whether the robot will be used in specific environmental conditions like high temperatures, humidity, or exposure to chemicals.
Bearings with corrosion resistance (e.g., stainless steel or plastic bearings) may be required for harsh environments.
8. Cost vs. Performance
While cost is always a factor, the quality of the bearing should not be compromised in mission-critical applications.
Ensure you balance performance and cost, considering the expected lifespan and operational conditions of the robotic arm.
9. Type of Bearing
Depending on the specific motion required, the following bearing types can be suitable:
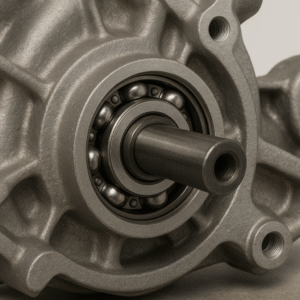
Ball Bearings: Offer good performance for high-speed applications and low-load operations.
Roller Bearings: Provide higher load capacity and are ideal for heavy-duty tasks.
Needle Bearings: Useful for tight spaces and when high load capacity is required with low radial space.
Tapered Roller Bearings: Ideal for handling both radial and axial loads in robotic arms with heavy movement and rotation.
Crossed roller bearings: With high rigidity and stability, minimal deflection, ensuring precise and accurate movement, they are suitable for robots in the manufacturing industry, where high precision is required in tasks such as assembly, welding or painting.
The cross roller bearings developed by bearing manufacturer VKUKEN have taken a leading market advantage in the industrial robot industry. In another article of mine, I have introduced the technical data of cross roller bearings in industrial robot applications in detail. Please click the link below to read.
10. Integration with Robot Design
The bearing must fit seamlessly with the design of the robotic arm, including the motors and actuators. Custom sizes or configurations may be needed.
Ensure proper alignment of the bearing to minimize stress and ensure smooth operation.
Conclusion
Choosing the right bearing for a robotic arm depends on the load requirements, precision needs, environment, and design constraints. Conducting a thorough analysis of the robot’s operational environment and performance criteria will guide the selection of the most appropriate bearing type. When choosing bearings, you can refer to relevant technical literature, or send us a consultation message. Our professional bearing engineers will contact you to provide you with technical assistance and select the most suitable bearings based on the actual application of your robot project.